Was öfter Probkeme macht ist der SPI unit, besonders direkt nach dem flashen des Pico.
Da hilft kein Pico Reset, manchmal klappt es gut nachdem man den Pico und der SD-Karte dann direkt einmal das Kabel "klaut" also stromlos macht.
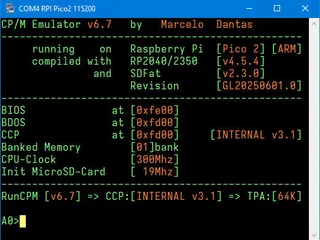
Ansonsten wird in meinem Binary nur mit 19Mhz die Karte initialisiert.
Es könnte bis 50Mhz gehen. Andere Karten mit Problemen kaufen manchmal besser bei 15 oder weniger MHz.
Aber 19 fand ich bei meinen ganzen Karten und diversen Picos einen guten Kompromiss.
Ansonsten zeig mal Deinen Aufbau und kooier mal die Fehlermeldungen aus der Arduino IDE.
Ich hatte auch einige Versionen die die onbiard LED beim Pico(2)W nutzen. Da die aber über den WLAN Part gesteuert wird ist dies langsamer als beim Pico(2) ohne W.
Deshalb sollte man, wenn man keine Version ohne hat, die DigitalWrite für die LED auskommentieren, wenn es erst Probleme nach dem SPI init gibt.
Ansonsten die Karte mal sauber mit dem SD Formatter formatieren.
Mehr fällt mir gerade nicht ein.